Traxion
Issue: XXI.3 May-June 2014Page: 6
Digital Citation

Authors:
Jun Rekimoto
 Traxion
Traxion
Traxion: a tactile interaction device with virtual force sensation from rkmtlab on Vimeo.
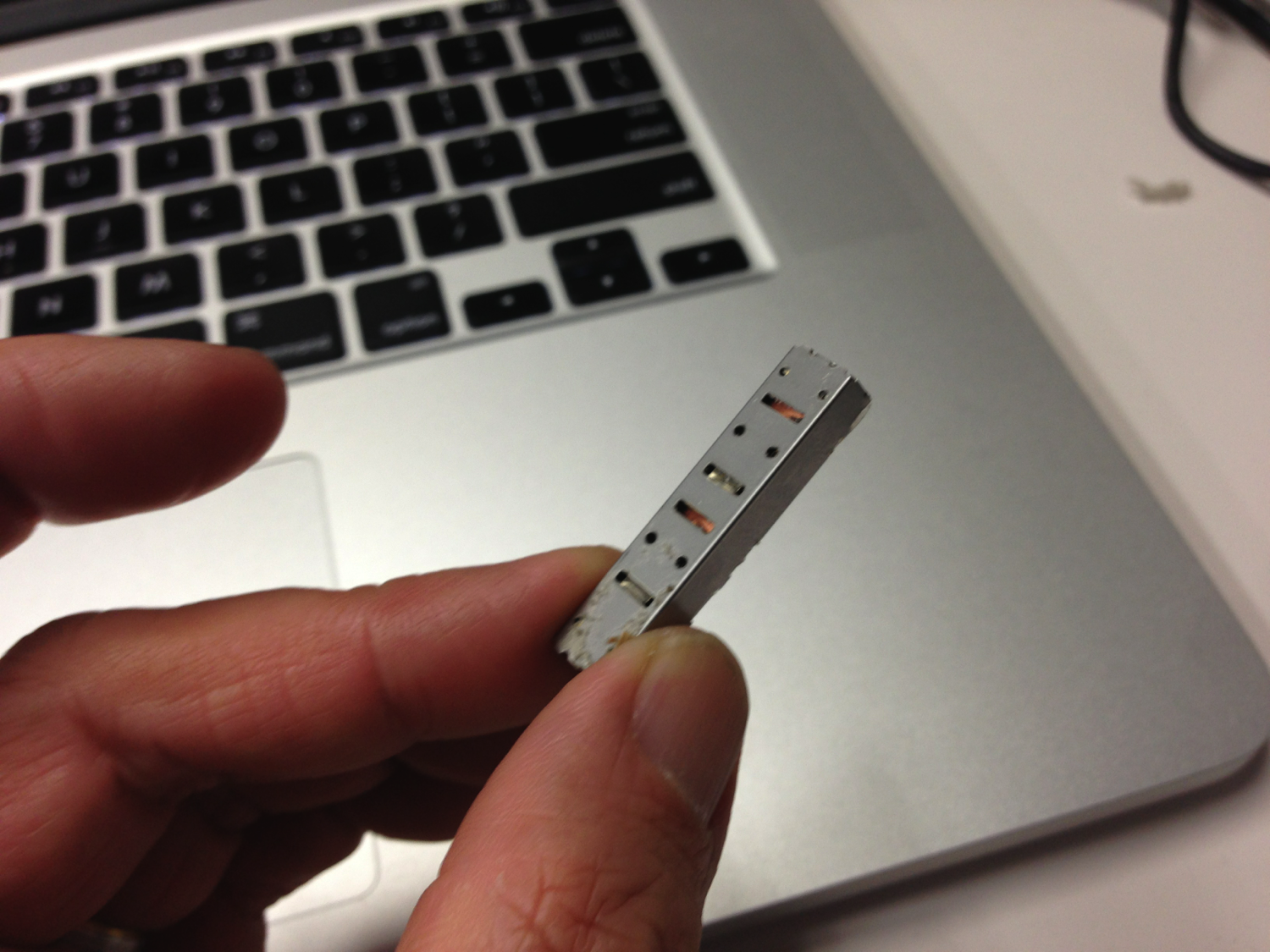
This research introduces a mechanism to induce a virtual force based on human illusory sensations. An asymmetric signal is applied to a tactile actuator such that the user feels the device is being pulled or pushed in a particular direction, although it is not supported by any mechanical connection to other objects or the ground. The proposed device is smaller and lighter than any previous force-feedback devices. This small form factor allows the device to be implemented in several interactive applications, such as a pedestrian navigation or an untethered input device with virtual force.
http://lab.rekimoto.org/projects/traxion
Rekimoto, J. Traxion: A tactile interaction device with virtual force sensation. Proc of UIST'13. ACM, New York, 2013, 427–432.
Jun Rekimoto, The University of Tokyo and Sony Computer Science Laboratories
[email protected]