IrukaTact
Issue: XXIII.5 September + October 2016Page: 8
Digital Citation

Authors:
Aisen C. Chacin and Takeshi Oozu
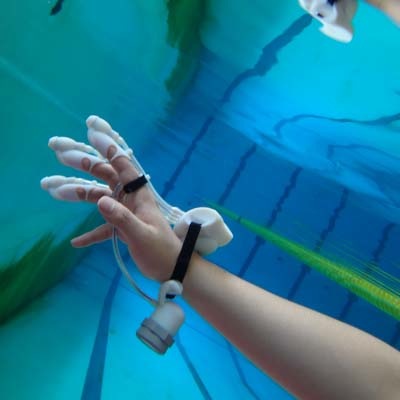
IrukaTact is an open source underwater glove that translates ultrasonic range-finding data into haptic feedback. Inspired by dolphin (iruka in Japanese) echolocation, this system detects underwater topographies, assisting in the location of sunken objects in flooded areas. Micro-pumps on the glove send haptic signals to the wearer's fingertips by propelling water of varying pressures. Our feedback method extends current haptic technologies by providing hybrid actuation, including pressure and vibration underwater, while preserving the wearer's natural ability to grasp objects. IrukaTact has many potential applications beyond underwater echo-haptic location, such as in new interfaces for virtual object simulation in aqueous environments.
http://aisencaro.com/iruka.html
Chacin, A.C., Oozu, T., and Iwata, H. IrukaTact: Submersible haptic search glove. Proc. of the 10th International Conference on Tangible, Embedded, and Embodied Interaction. ACM, New York, 2016, 392–397.
Aisen C. Chacin, University of Tsukuba
[email protected]
Takeshi Oozu, University of Tsukuba
[email protected]
 |
An underwater glove with haptic feedback inspired by dolphin echolocation. |