How was it made? Social robotic donuts
Issue: XXVI.3 May - June 2019Page: 14
Digital Citation
Authors:
Harvey Bewley, Laurens Boer

Describe what you made. We created an air-actuated, donut-shaped social robot. Our intention was to purposefully move away from typical human or animal form mimicry, focusing instead on elastic expression, ambiguous form, and playful behaviors. Stable and solid looking, the smooth and symmetrical donut is a shape distinct from any single living thing. The intention is to play on the contrast between a molded (engineered) aesthetic and the strangely organic soft robotic movements it will produce. Three independently inflating air chambers were chosen so as to avoid comparison to symmetry in bodies, for example, legs, kidneys, or lungs.
 |
RhinoCAD modeling of a half donut, inserts, and a mold concept. |
Briefly describe the process of how this was made. We took a playful, hands-on approach with the aim of creating an object flexible enough to afford a wide range of expressive movements and robust enough to stand up to the naturally physical reactions and interactions we hoped to provoke. Finding the right balance between this elastic expression and robustness was central to our material explorations.
 |
Setup for repeatable silicone molding with suspended inserts. |
What expertise (skills and competences) did it require? A mix of industrial design and craft, mold engineering, and electronics and programming knowledge. Having all of these available in the lab meant we could be explorative while ensuring that the robot would work.
 |
Silicone molding result. |
What is the one thing about making this that you would like to share with other makers? Playful thinking through making was crucial to many of our "breakthroughs." Often the articulation of thoughts or ideas was possible only after or during the making itself. Having faith in our ideas and creating a space in the workshop where they could mature before reflecting on and making sense of the outcome was invaluable.
 |
Material testing and prototyping experiments. |
Often the articulation of thoughts or ideas was possible only after or during the making itself.
Was this a collaborative process, and if so, who was involved? Yes, very. In addition to leveraging our own skills in engineering and industrial design, we worked with a colleague skilled in Max/MSP (normally used for sound and graphic design). This allowed us to design an editable GUI to program the robots' movements, appropriate for real-time manipulation of each air chamber's movement over a 64-beat sequence. Crucially, this interface allowed us to work with experts chosen for their literacy in body language, movement, and expression, rather than their knowledge of robotics and programming. To broaden temporal form opportunities, we then invited dancers and other performance artists to compose their own movement sequences in collaborative sessions that we called choreographic sketching.
 |
A performing artist programming elastic expressions of the silicon robotic donut using the MAX/MSP interface. |
What will you repeat in another project that you did well in this project? Explore novel combinations of tools and design materials. We found much drive and curiosity in working with composites of various materials and using different prototyping tools. This inspired new ideas for making that allowed us to move closer to an implementation of our intended design.
 |
Assembly of rigid side (pink part: 3D-printed protective shell) and moving side (yellow part: silicone skin; blue parts: 3D-printed inserts). |
 |
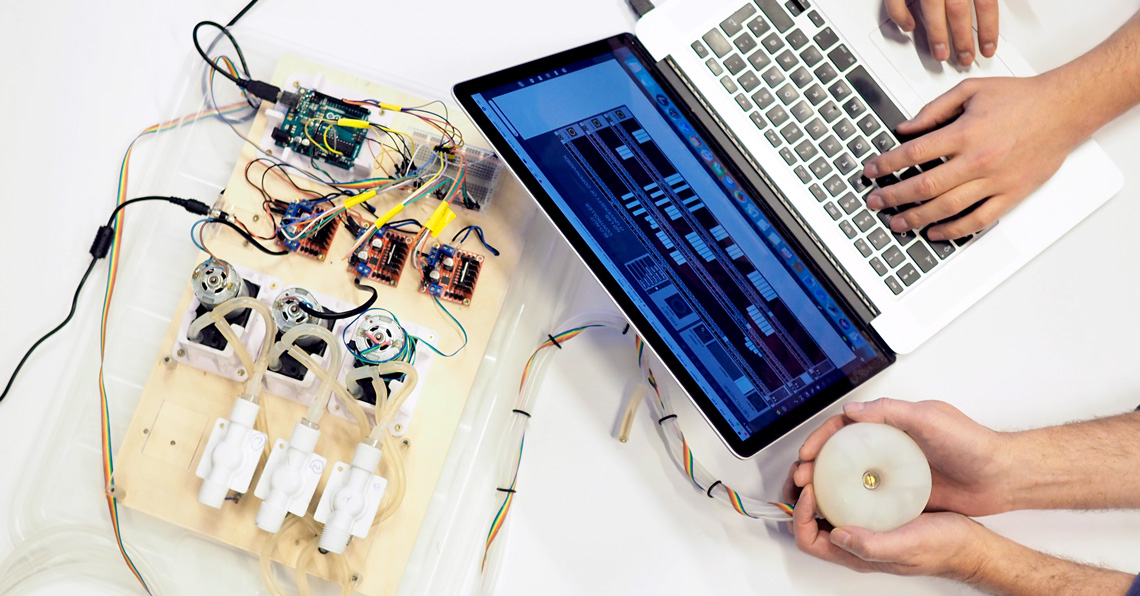
Hardware and software setup for programming elastic expressions of the robotic donuts. |
 |
Choreographic sketching with MAX/MSP interface to set tempo and individual air-actuation sequences for each air chamber. |
Authors
Harvey Bewley, IxD Lab, IT University Copenhagen
Laurens Boer, IxD Lab, IT University Copenhagen, [email protected]
Footnotes
Copyright held by authors
The Digital Library is published by the Association for Computing Machinery. Copyright © 2019 ACM, Inc.