IrukaTact
Issue: XXIII.6 November-December 2016Page: 16
Digital Citation

Authors:
Aisen Chacin, Takeshi Oozu

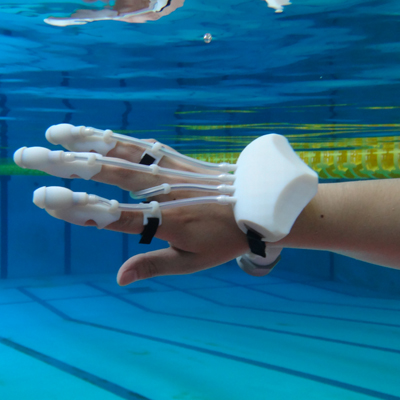
Describe what you made. IrukaTact is a submersible haptic search glove that assists in the location of sunken objects. It is inspired by dolphin (iruka in Japanese) echolocation.
The system detects the topography of flooded areas with a sonar sensor that sends haptic signals to the wearer's fingertips. These signals are produced by micro-pumps that propel water jets onto each digit. The strength of the jets depends on proximity; the closer the object is to the wearer's hand, the more pressure they will feel.
 |
Electronic circuit of IrukaTact, Maxbotix Sonar, Arduino promini, and small motor. |
Briefly describe the process of how this was made. The look and feel of IrukaTact is largely inspired by its name, dolphin; as we designed each part, we were thinking of waves and fins. Through various iterations, we created alternative tips and improved on what would become the semi-final design for the micro-pump actuators. Our main goal was to create an aquatic haptic sensation, so we began by testing various modes of actuation with motors underwater. We had to decide between propelling the fingers upwards with propellers or using impellers to provide water of varying pressures onto the fingers. We quickly realized that in order to lift the fingers with a propeller, we would need a much more powerful system that would be bulky and unwearable. So we continued to test various impeller designs to understand which model would be the most powerful. We also tested fingertip thimble designs, making various options for the motor placement. We realized that the best sensation was achieved by placing the motor underneath; however, this would mean that the motor would interfere with the hand's natural grasping movement. We ultimately decided to place the motor on top and channel the suctioned water from the sextuple impeller onto the volar pad of the fingers.
Another challenge for making this glove was the sonar placement, since the probe was very large and we had to design a system that could move it in parallel with the user's palm. We created a mechanical system with a hinge on the wrist that would sync the sonar to the palm. We did this by creating tension with the same silicone tubes—airtight conduits—that connected the cables from the electronics housing to the motors and to the sonar probe.
 |
Underbelly of impeller fingertip haptic actuator thimble housing with six-blade impeller model. |
What materials and tools did you use? We were very lucky to have unlimited access to a very high-quality poly-jet printer, which meant we could test various designs fairly easily. We used the simplest online 3D modeling tool called TinkerCad. We shared our designs with resizable tips so that anyone with small or large fingers can print it and wear it. To waterproof our design, we used motor grease for the rotating parts and hot glue for the nonmovable parts. Also, we used a circular screw cap with an o-ring to seal the electronics housing.
 |
Impeller model propulsion tests. |
What is the one thing about making this that you would like to share with other makers? When designing waterproof housings always use rounded openings. This allows for equal pressure around the model, which makes it more easily sealable from water, unlike corners. Also, iteration, iteration, iteration; make, test, and make it again! Creative flow is wonderful when you make it and break it!
 |
Underbelly of impeller fingertip haptic actuator thimble housing. |
 |
Fingertip haptic actuator thimble housing evolution; impeller and propeller designs. |
Authors
Aisen Caro Chacin, Empowerment Informatics Studio, Tsukuba University, [email protected]
Takeshi Oozu, Empowerment Informatics Studio, Tsukuba University, [email protected]
Footnotes
http://aisencaro.com/iruka.html
https://www.tinkercad.com/things/kBM7ebBBaUN
Copyright held by authors
The Digital Library is published by the Association for Computing Machinery. Copyright © 2016 ACM, Inc.